










お客様のメリット
- 遠隔で作業開始操作を行うと建設機械がみずから判断して自動で作業を行います。
- 目標を指示すれば建設機械が自動的に割岩を行うので誰でも簡単に操作できます。
- 目標への接近からツールの押当て、割岩までを自動で行います。
技術の特徴
割岩作業の自動化
従来の無人化施工システムは、操作室のオペーレータが現場周辺の複数のカメラ映像を見ながら、絶えず操縦桿を操作する映像依存・遠隔操作です。このため、複数のカメラとその映像送信のための通信インフラの設置といった整備コスト、遠隔操作に熟練したオペレータ不足、通信遅延による映像や操作のタイムラグといった問題がありました。本システムは、パソコン上で破砕する目標の岩を指定するだけで、建設機械が目標付近まで自動で接近して、目標の岩に割岩用ツールを押当て、自動で破砕します。制御は車載PCが行うため通信遅延はほぼなく、操作室との通信も最小限で済みます。
目標への正確な打撃
割岩作業では、割岩用ツールが目標の中心を確実に捉えた状態で打撃を加えなければ、上手く破砕することが出来ません。T-iROBO Breakerはステレオカメラにより目標の3次元形状を取得し、中心を的確に見極めることが出来ます。そして岩を割る「割岩用ツール」を正確に誘導して打撃を加えることで、割岩を行います。
-
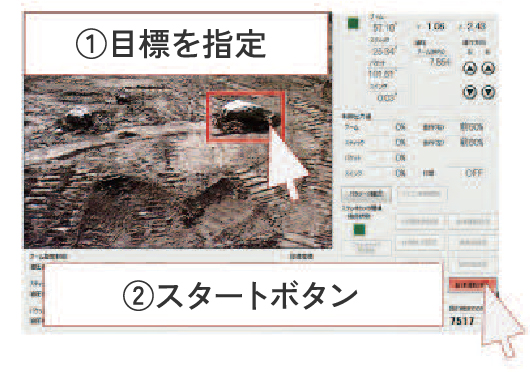
PC上で目標の岩を指定
カメラ映像を観ながら目標の岩を指定スタートボタンを押して自動割岩開始
-

自動で目標を割岩
目標付近まで接近走行し、最適な位置へツールを制御して割岩
-
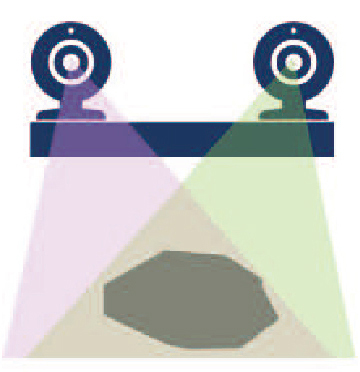
目標の3次元形状確認
ステレオカメラにより目標の3次元形状を取得
-

目標中心への打撃
割岩に最適な岩の中心を見極め割岩用ツールを誘導して割岩
-
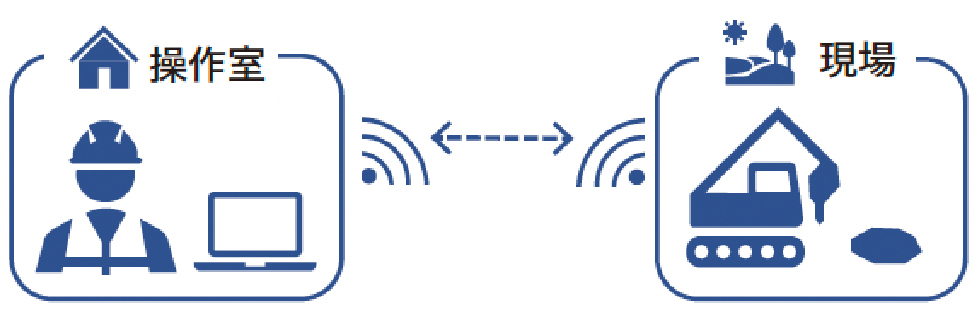
無線通信を使用して遠隔地からの制御を実施
-

建設機械が電制化されている場合の後付け装置
実績・事例詳細
2機種に適用
これまでに2機種のベースマシンにT-iROBO Breakerを実装しました。1機種目は、機体重量13t級のベースマシンで、外部からの信号による制御を行うために改造を施した機体です。2機種目は機体重量20t級のベースマシンで、外部からの制御信号(※CAN信号)を機体のコネクタを通じて直接与えることで制御が可能な機体です。CAN:自動車や建設機械、産業用ロボット等の機械内部において、各システムやセンサを接続するためのネットワーク規格。
人と同等以上の作業スピード
T-iROBO Breakerによる自動割岩作業のスピードを、熟練オペレータによる遠隔操作の場合と比較した実験を行いました。その結果、T-iROBO Breakerは熟練オペレータによる遠隔操作と同等以上のスピードでの割岩作業が可能であることを確認しています。
高精度な打撃ツール制御
目標の岩に対して正確に打撃ツールを押当てる性能を調べる実験を行いました。その結果、適用した2機種共に90%を超える高い精度で打撃ツールを岩の中央に押当てることが可能であり、高い精度での目標認識と機体制御を行えることを確認しました。
-

1 機種目:13t級ベースマシーン(CAN 非対応)
-

2 機種目:20t級ベースマシーン(CAN 対応)
-
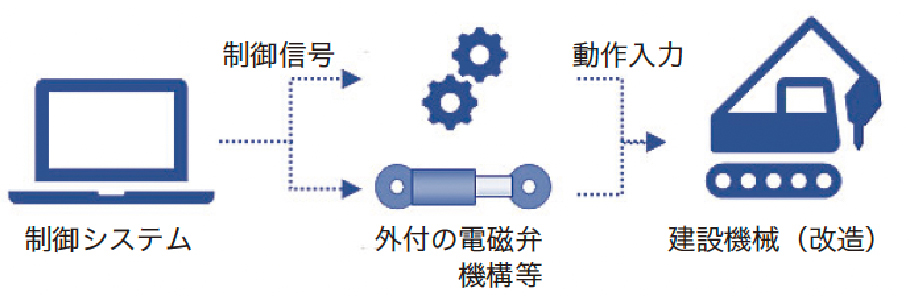
外付のアクチュエータを介して機体を制御
-
制御システムから直接機体を制御

